
コンプライアンス 制御
この記事の内容 コンプライアンスマネージャーとは何か、コンプライアンスを簡素化してリスクを軽減する方法、および主要なコンポーネントについて説明します。 In this article:.
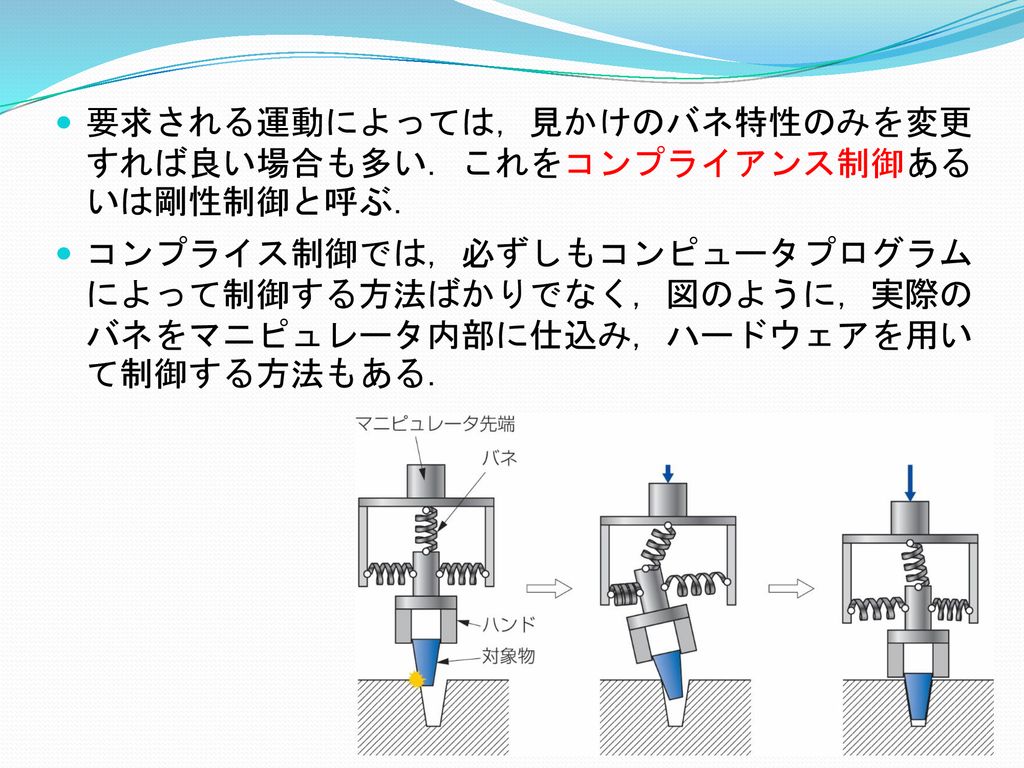
コンプライアンス 制御. 先述した訓練機器制御に関する研究の多くは,インピーダンス制御を用いている.平林 ら (6) が発表した仮想コンプライアンス制御も広義ではインピーダンス制御の一種であり,. P制御のまとめ X goal どうやら... •最終的に目標値(x=1.0)に達しない? •はじめに振動するかどうかは,ダンパの大きさに依存? 用語 定常偏差(offset) 過渡状態 定常状態 overshoot hunting 目標値 P制御の数学 X goal •システム •力の制御の仕方 •つまり. 21年1月25日(月) ~1月29日(金) 条件反射制御法実地研修(第64回) (年度 第8回) 下総精神医療センター:.
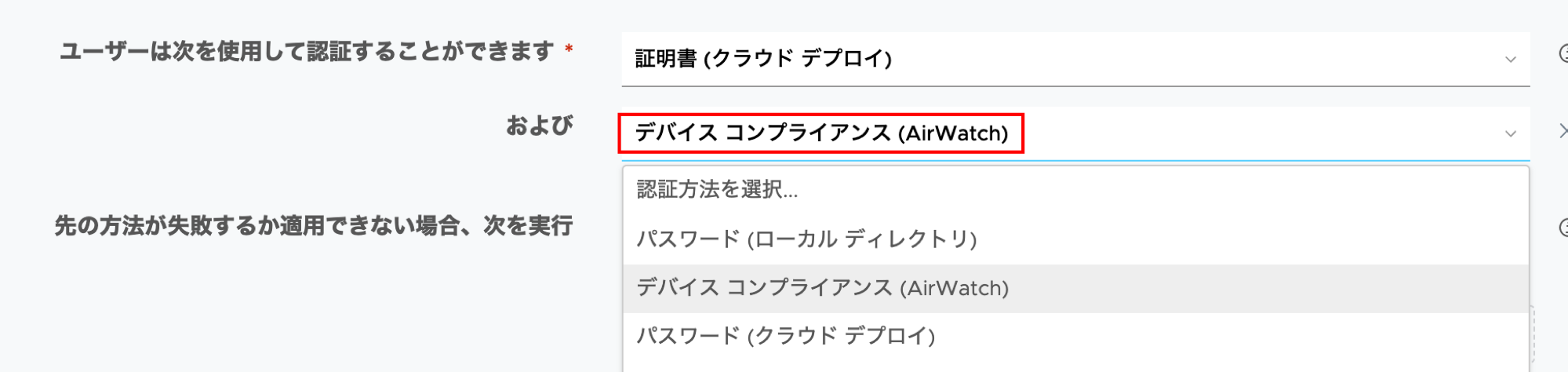
D, A publication of Industry Applications Society 122(9), 942-947,. 電子制御式サスペンション(tems) 19年2月、「ソアラ」に採用されたtems(トヨタ電子制御サスペンション)は、フロントおよび リヤサスペンションのショックアブソーバーの減衰力を2段階3モードに制御し、アンチロール、ダイブ、スクオットの機能を持った、乗り心地および操縦安定性の. このアクセスの制御は、デバイス コンプライアンス ポリシーに含める非準拠に対するアクションとは別のものとして追加されます。 This access control is in addition to and separate from the actions for noncompliance that you include in your device compliance policies.
Mechanical compliance )は、物体の伸縮性・可塑性を定量化した物理量であり、バネ定数の逆数。 機械コンプライアンス、単にコンプライアンスとも。単位はメートル毎ニュートン (m/N)。. ASCII.jpデジタル用語辞典 - コンプライアンスの用語解説 - 法律や社会的な通念を守ること。法令順守と訳されることが多い。1990年代後半から企業の法律違反に端を発する事件が相次いで発生したことから、企業はより厳密に法律を守るべきという社会的要請が強まっている。. アクティブ・コンプライアンスの制御はマイクロコントロー ラで行い,内部処理は主として制御演算部とシステム制御 部とに分けられる(図。)2 制御演算部は外力推定と定電流,コンプライアンス,位 置,力制御,pwm変調に必要な演算を行い,システム制御.
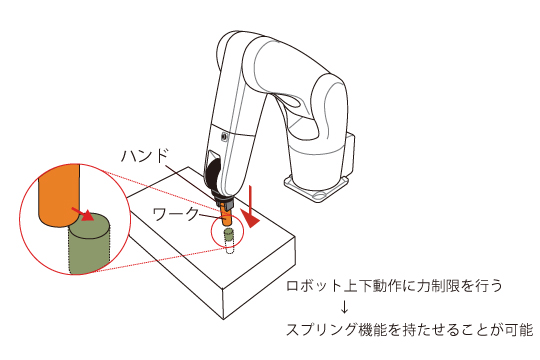
出力軸のトルクが零(厳密には極めて小さな値)になるように制御するので、出力軸に力を加えると、 簡単に動かすことができる。 ⇒ ダイレクトティーチング:. コンプライアンス制御に基づく環境外乱を考慮した車椅子型移動ロボットの一構成法 桂 誠一郎 , 大西 公平 電気学会論文誌. Microsoft コンプライアンスマネージャー Microsoft Compliance Manager.
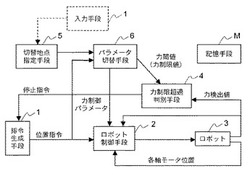
(57)要約 課題 接触安定性と位置制御精度の両者共に良好な コンプライアンス制御系を実現すること。 解決手段 マニピュレータに力およびトルクのフィ ードバツク制御を構成し、その上位に、位置、速度、加 速度のフィードバツク制御を構成したことを特徴とする 力トルクベース. 冗長ロボットアームのためのコンプライアンス制御の一手法 横井 一仁 , 前川 仁 , 谷江 和雄 日本ロボット学会誌 11(1), 121-130,. D, 産業応用部門誌 = The transactions of the Institute of Electrical Engineers of Japan.
インピーダンス制御(位置入力 ・力出力) 目標位置と目標インピーダンス(バネ・マス・ダンパのパラメータ)を決めた状態でエンドエフェクタに力が加わると、目標位置に留まるように関節の固さ(軟らかさ)を調整する。アドミッタンス制御のように、力に流されるのではなく、寧ろ. 計測自動制御学会東北支部 第196 回研究集会(01.7.30) 資料番号 196-14 電気・油圧サーボ機構におけるコンプライアンス制御 Compliance Control of Electro-Hydraulic Servo System 西 智之*,松崎 良則**,佐々木 芳宏*,飯村 彧郎*. 企業の経営者や法務担当者、総務部長で、コンプライアンス(法令遵守)を軽くみているという人は、さすがにもういないでしょう。 コンプライアンス意識が不足したことで大ダメージを受けた企業は枚挙にいとまがなく、マスメディアもこの問題を活発に報じています。 そのためいまや.
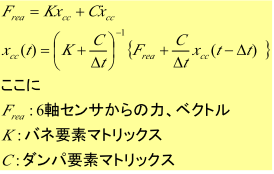
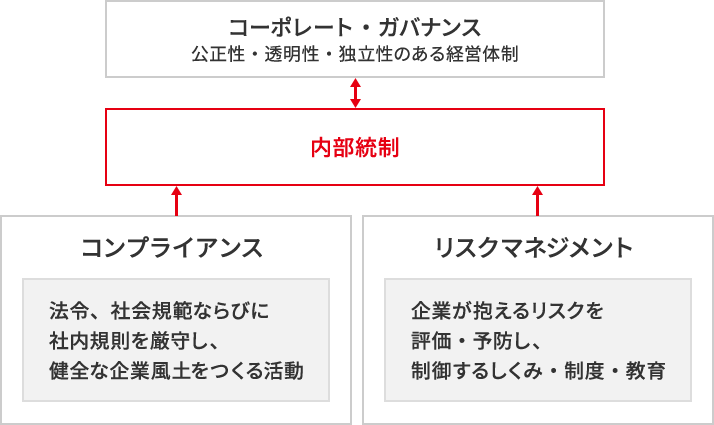
Compliance(コンプライアンス)とは。意味や解説、類語。1 要求や命令への服従。㋐ 法令遵守。特に、企業がルールに従って公正・公平に業務を遂行すること。㋑ 服薬遵守。処方された薬を指示どおりに服用すること。2 外力が加えられたときの物質の弾力性やたわみ強度。. ③コンプライアンス・リスクを事前に察知し低減・制御するために策定している方針及 び構築している内部統制並びにこれらの実行のあり方 ④コンプライアンス・リスク管理のために、ガバナンス態勢を構築する上で取り組んで いること。. コンプライアンス制御は、これらの機械的インピーダンス と作用力との関係を定義し、力が働いたときの変位を運動力 学的に予測して制御する手法である。すなわち、制御対象と して質量mの物体に粘性抵抗d、剛性kが与えられ、作用.
コンプライアンス制御やらアドミタンス制御やらいろいろ聞くのでまとめてみた(適当) そしたら思ったより被った話ばっかりだった(ウケる)インピーダンス制御はその名の通り機械インピーダンスを制御する。 環境と接触するときに機械インピーダンスを小さくすることで柔らかく、無理な力が. Learn what Compliance Manager is, how. Microsoft 365 セキュリティ センターまたは Microsoft 365 コンプライアンス センターを使用すると、セキュリティまたはコンプライアンスに関連するすべてのタスクについて、アクセス許可を一元的に管理できます。.
「コンプライアンス」は、 「命令や要求などに従うこと」 という意味です。 「法令遵守(ほうれいじゅんしゅ)」と訳されることが多いですが、その他にも「社内ルールやモラルに従う」という意味でも使われています 。 本記事では、「コンプライアンス」の意味をできるだけ分かりやすく. 置制御の混じったコンプライアンス制御となる。 ④パラメータKhを調節するだけで,完全な力制御と 位置制御をコンプライアンス制御を介して,滑らかに 連続的に切り変えられる。 という特長を持つ。 コンプライアンス制御と,ハイブリッド制御を切り. 定義: マニピュレータ(※1)のコンプライアンスを作業目的に合わせて所定の値に制御すること。 備考: 操作量は関節速度の場合が多い。 対応英語(参考): compliance control (※1).
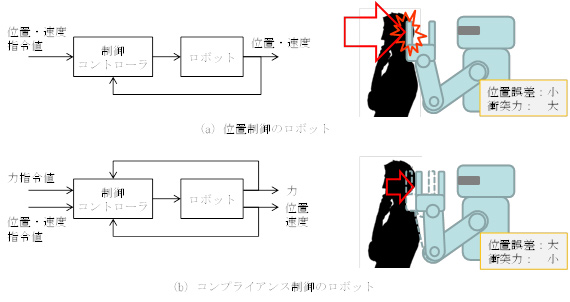
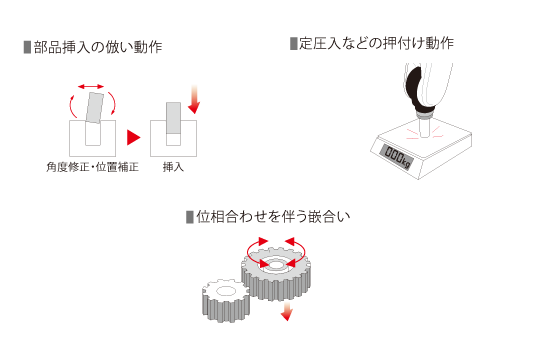
コンプライアンス制御 目標角度と実際の角度との誤差に対する出力を調整することで、バネが入っているかのような柔らかい動きが可能です。 コンプライアンス機能により得られる弾性はあくまで電気的に再現しているものであり、パラメータの設定に. 力制御とコンプライアンス制御はトルク指令型と同様にスイ ッチ行列Sに よって作業座標系の自由度単位で切り替えるこ とができる.ま た,通 常の位置制御をある自由度に対して行い. コンプライアンス制御,インピーダンス制御それぞれの制御則を導出した.rv-1a はサーボ系が 公開されているために,制御則から計算される位置指令値をサーボ系への目標値として与えるこ とで受動的な力制御を実現できた..
343 計測自動制御学会論文集 Vol.22, No.3 (昭和61年3月) 多自由度ロボットの仮想コンプライアンス制御† 平 林 久 明*・杉 本 浩 一*・荒 井 信 一*・坂 上 志 之*. 条件反射制御法実地研修(第63回) (年度 第7回) 下総精神医療センター:. ブリタニカ国際大百科事典 小項目事典 - コンプライアンス制御の用語解説 - ロボットアームなどのマニピュレータの力を制御する方法。コンプライアンスとは,ばねのたわみやすさの意味で,ばねのようなしなやかさをもたせて複雑な作業に対応させ,破損の危険を避ける。.
ラマブルパッシブコンプライアンスを実現する機構MIA (Mechanical Impedance Adjuster)を開発した.この機 構ではリンクとコンプライアンスを制御するアクチュエー JRSJVol.17No.6 —28— Sept.,1999.

マニプレータ マニプレータ装置を持つ小室 B25j 1995年分 151件

公表特許公報
インピーダンス制御とコンプライアンス制御 Gggggraziegrazie
コンプライアンス 制御 のギャラリー
Workspace One ブログ コンディショナルアクセスとは 技術ブログ C S Engineer Voice

Office 365 セキュリティとコンプライアンス
コンプライアンス 住友共同電力
2
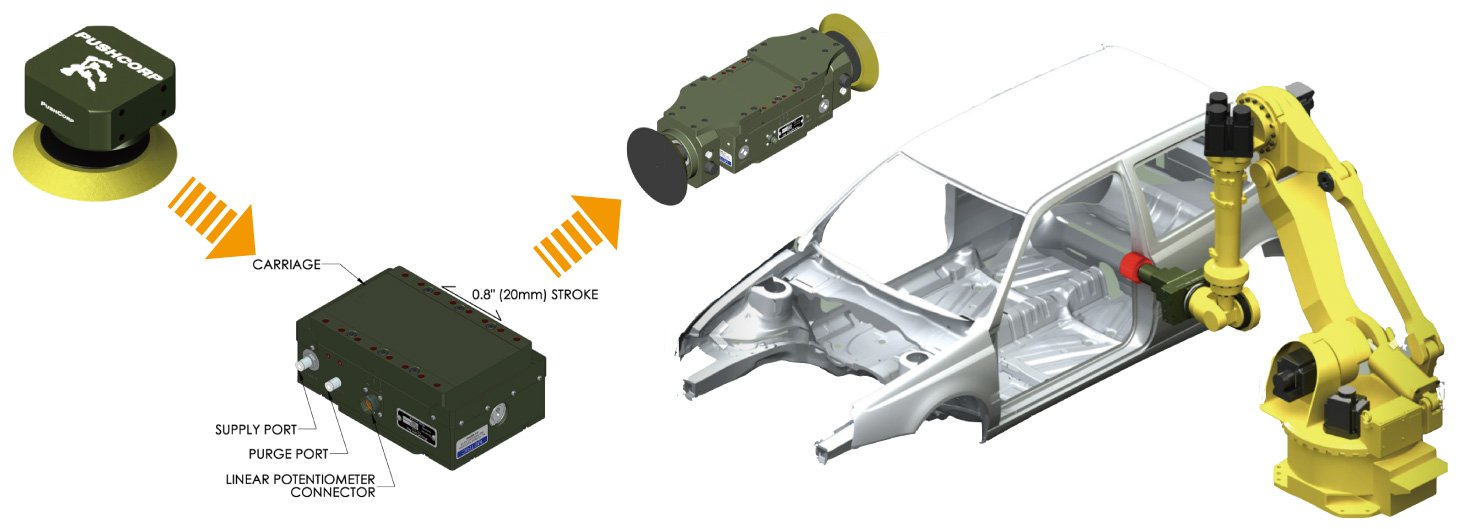
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社

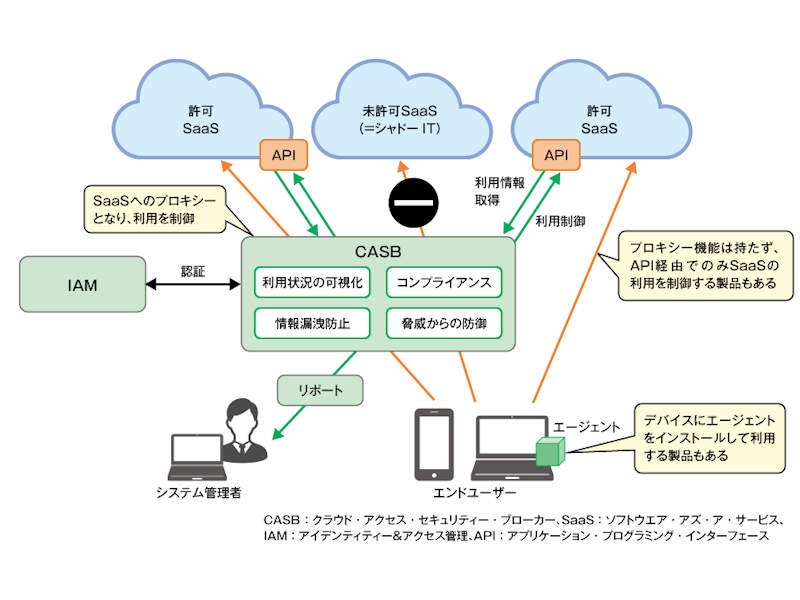
B 図3 アクセス制御を抜けた先では 情報制御 を行う B 日経クロステック Xtech
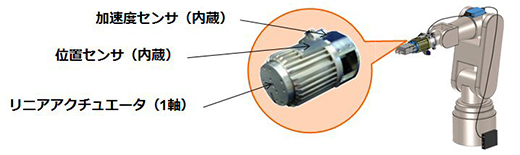
人の手や視覚 知能を機械化し 変化に柔軟に対応できる技術を開発 ニュースリリース アズビル株式会社 旧 株式会社 山武

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御
2
セキュリティとコンプライアンス Box

仮想コンプライアンス制御の意味 用法を知る Astamuse

医療機器メーカーは 品質管理プロセスを制御することで革新的な製品をいち早く市場に投入できる Ptc
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf

Salesforce モバイルアプリケーションへのアクセスの制御 単元 Salesforce Trailhead
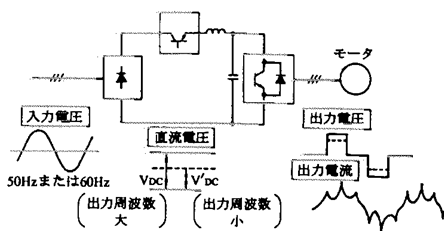
種類と特徴 インバータとは インバータ 製品 ソリューション 安川電機

コンプライアンス 重点分野3 社会とともに発展する 環境 社会活動 Csr 小松製作所 建設機械のコマツ

電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御 Youtube

Robotec
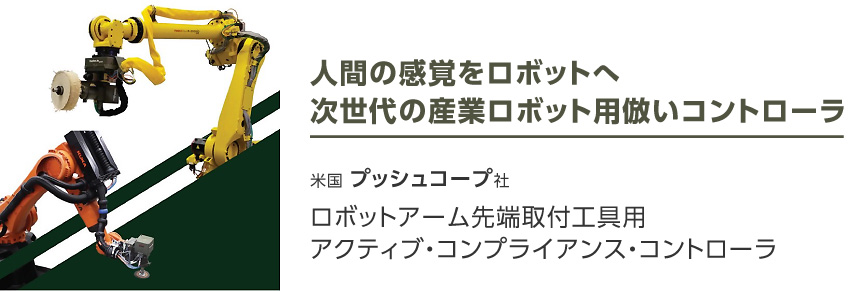
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社

開放特許情報データベース 開放特許情報データベース
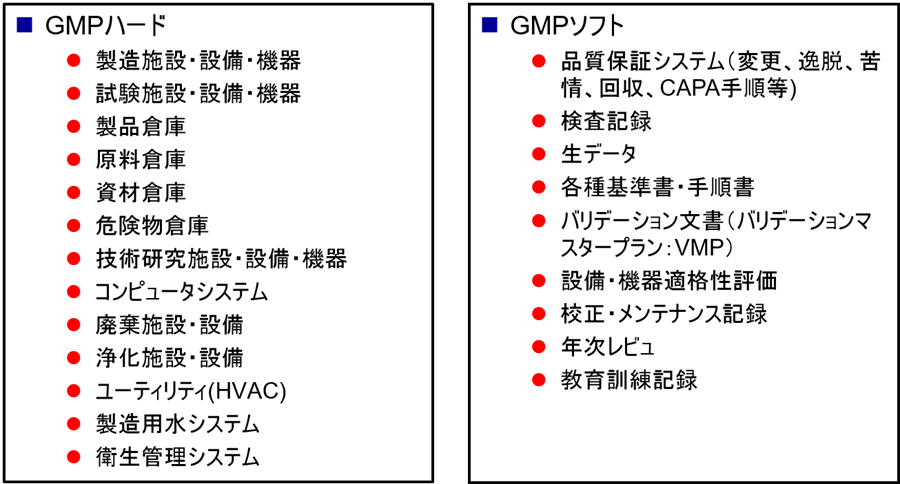
Csvと適格性評価とプロセスバリデーションの関係
Wa4wbv7dunx6cm

内部統制システム 組織統治 Csr 環境 エプソン

Robotec

Wo1709a1 外力追従制御システム Google Patents
Http Www Hondafoundation Jp Data Files View 300

電流出力dacによる正確なトランスデューサ制御 Digikey
学位論文要旨詳細

藤本研 研究テーマ
Www Toshiba Co Jp Tech Review 11 05 66 05pdf F04 Pdf
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf

外乱オブザーバの紹介 Qiita
Http Www Hondafoundation Jp Data Files View 300
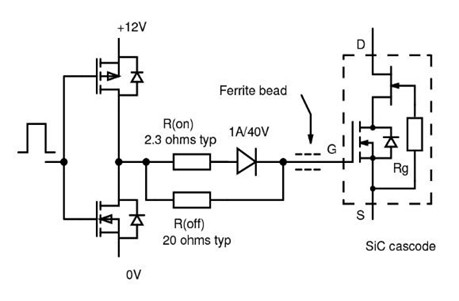
Sicスイッチの特性と設計上の注意点 2 2 Edn Japan

アクセス制御管理 Omnicontact 株式会社アセンド
Www Hitachihyoron Com Jp Pdf 1984 10 1984 10 08 Pdf

コンプライアンス Nitto 日東電工株式会社

799円でpcからフタバ製コマンド方式サーボを動かそう ぷらぎあ工房
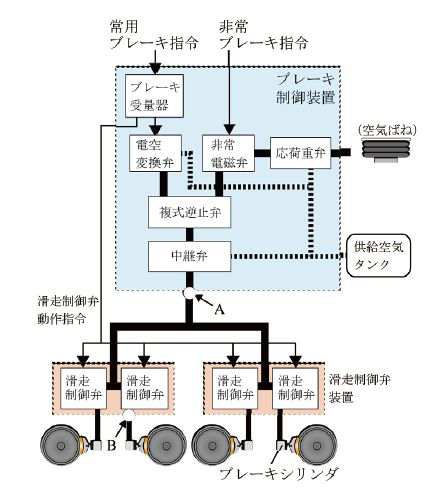
公益財団法人鉄道総合技術研究所 車両ニュースレター 16年4月号
彡 マッサージロボット 続編 株式会社ロボメカニクス研究所
Jfps 日本フルードパワーシステム学会

ロボット工学第2回資料

1996 号 仮想コンプライアンス制御を適用するバリ取り方法 Astamuse

コンプライアンス制御 Youtube
2
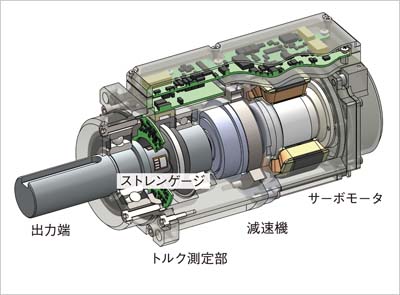
株式会社ロボテック 出力軸トルク測定機能付きサーボモータ ユニサーボ こだわり物語
セキュリティとコンプライアンス Box
ガバナンスってなに コンプライアンス 全力支援 Htc ハイテクノロジーコミュニケーションズ
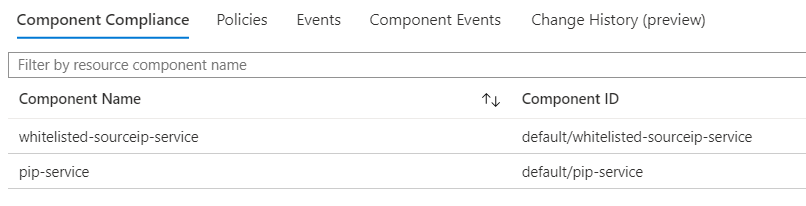
ポリシーのコンプライアンス データを取得する Azure Policy Microsoft Docs

デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 株式会社エクサウィザーズ
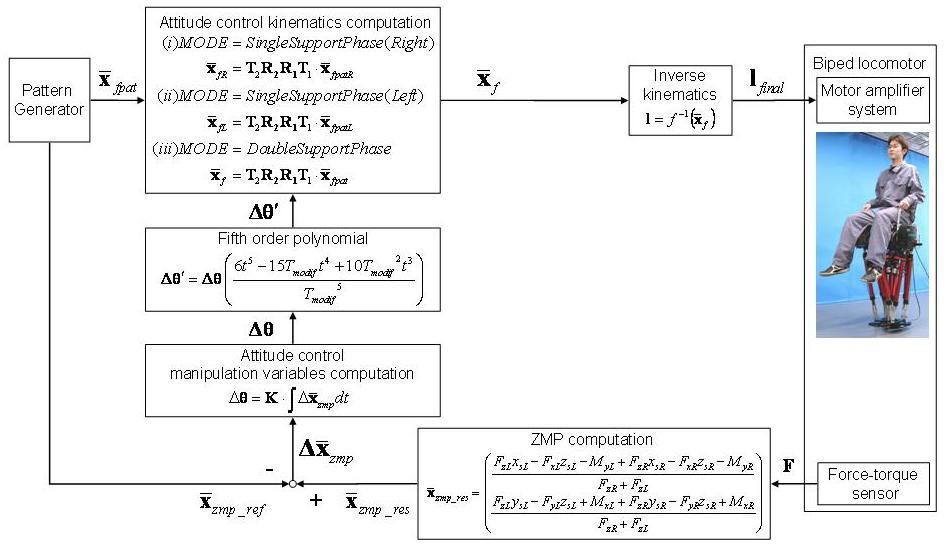
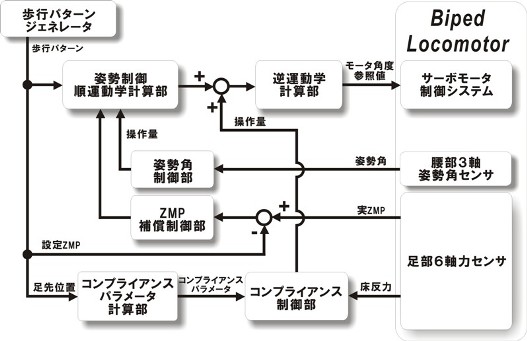
Wl 16riii概要
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku

1995 号 マニピュレータのコンプライアンス制御装置 Astamuse
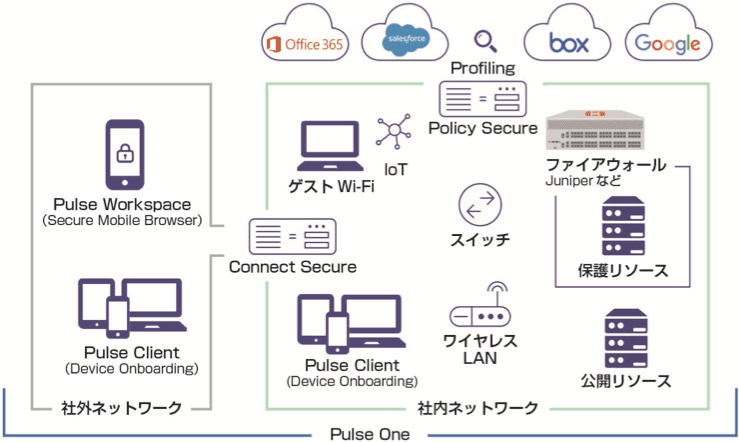
Pulse Secure パルスセキュア ジェイズ コミュニケーション

脚式移動ロボットの歩行制御装置
Http Www Topic Ad Jp Sice Htdocs Papers 252 252 2 Pdf

電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御 Youtube
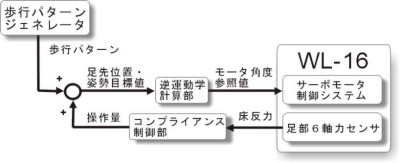
Wl 16 Waseda Leg No 16
デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 デンソーウェーブのプレスリリース
Lq最適制御による振動制御系設計入門 実験とシミュレーションとはかせ工房
インピーダンス制御とアドミッタンス制御 Gggggraziegrazie
コンプライアンス リスクマネジメント 社会性報告 社会 環境 Csr 帝人株式会社
コンプライアンス 企業倫理とコンプライアンス ガバナンス 川崎重工業株式会社

コンプライアンス制御ユニット Fill Ide Compressors デジタル タッチスクリーン式

Robotec 電動トルクアクチュエータ
モータ制御基板 ブラシレスdcモータ Dcモータ 有限会社はじめ研究所
Office 365 セキュリティとコンプライアンス

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御

コンプライアンス制御の意味 用法を知る Astamuse

1994 号 コンプライアンス制御装置 Astamuse
学位論文要旨詳細
ロボット工学 第14回 インピーダンス制御 福岡工業大学 工学部 知能機械工学科 木野 仁 Ppt Download

コンプライアンスステア Aki Rsのブログ 白ロドとゆく みんカラ

出願人 株式会社安川電機 の特許一覧 日本特許情報 発明ナビ

ガバナンス担当役員は コンプライアンス画面を触れています メタファーと技術のビジネス コンセプトは コンプライアンス制御 運用の透明性と It ガバナンスの実践します の写真素材 画像素材 Image
安全な協働ロボットのための壊れにくい力覚センサの開発 1 Sens Aitプロジェクト

1998 号 マニピュレータのコンプライアンス制御方式 Astamuse

東京都市大学 Rls研究室 Dual Arm Robot Group
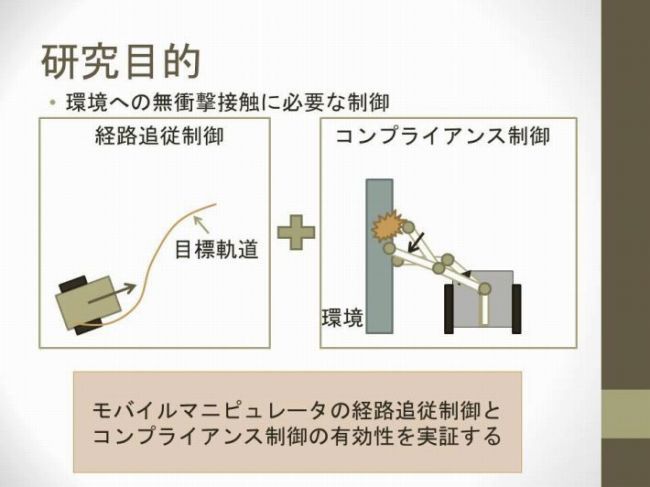
モバイルマニピュレータ 豊田工業大学 制御システム研究室
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf

Robotec

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御

ロボット制御における特異点 エクサウィザーズ Engineer Blog
Wl 16 Waseda Leg No 16
Jfps 日本フルードパワーシステム学会
力センサ有コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ
コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ

産業用ロボット Melfa Sq Sdシリーズ 三菱電機 株 Mitsubishi デジアナeカタログ メカトロネット

リスク コンプライアンス Kioxia

知能機械制御学研究室

マニピュレータ ロボット 速度 力 ハイブリッド制御 制御パラメータが複数あるもの ハイブリッド制御
本研究室の修士2年生の遠池亮成君がシステム制御 情報学会研究発表講演会 Sci で学生発表賞を受賞しました 新着情報 知能ロボティクス研究室 牛田研究室

電子情報開示調査のためにコンプライアンスの境界を設定する Microsoft 365 Compliance Microsoft Docs
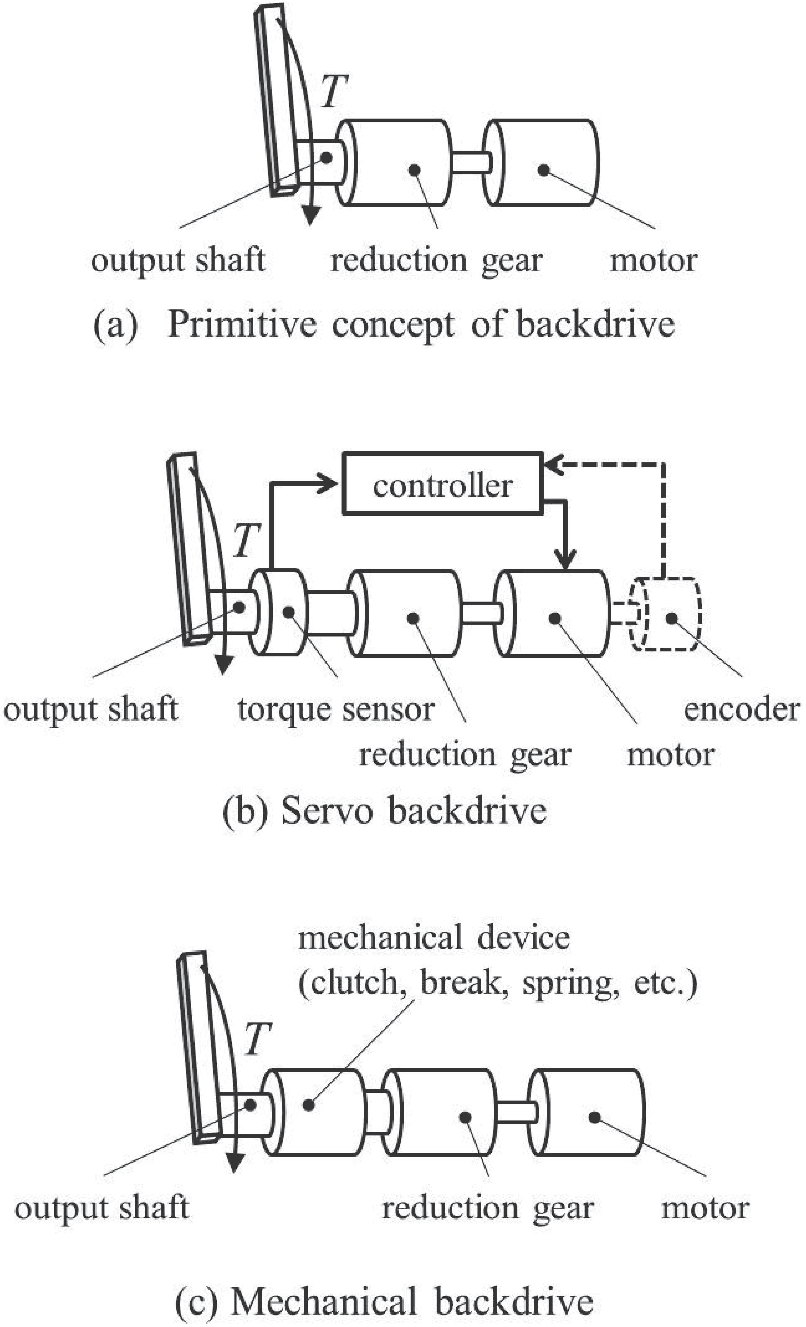
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku
力制御装置
特表19 知財ポータル Ip Force
シャドーitを検知 制御するクラウドアクセス管理 Casb Netskope Nriセキュア



